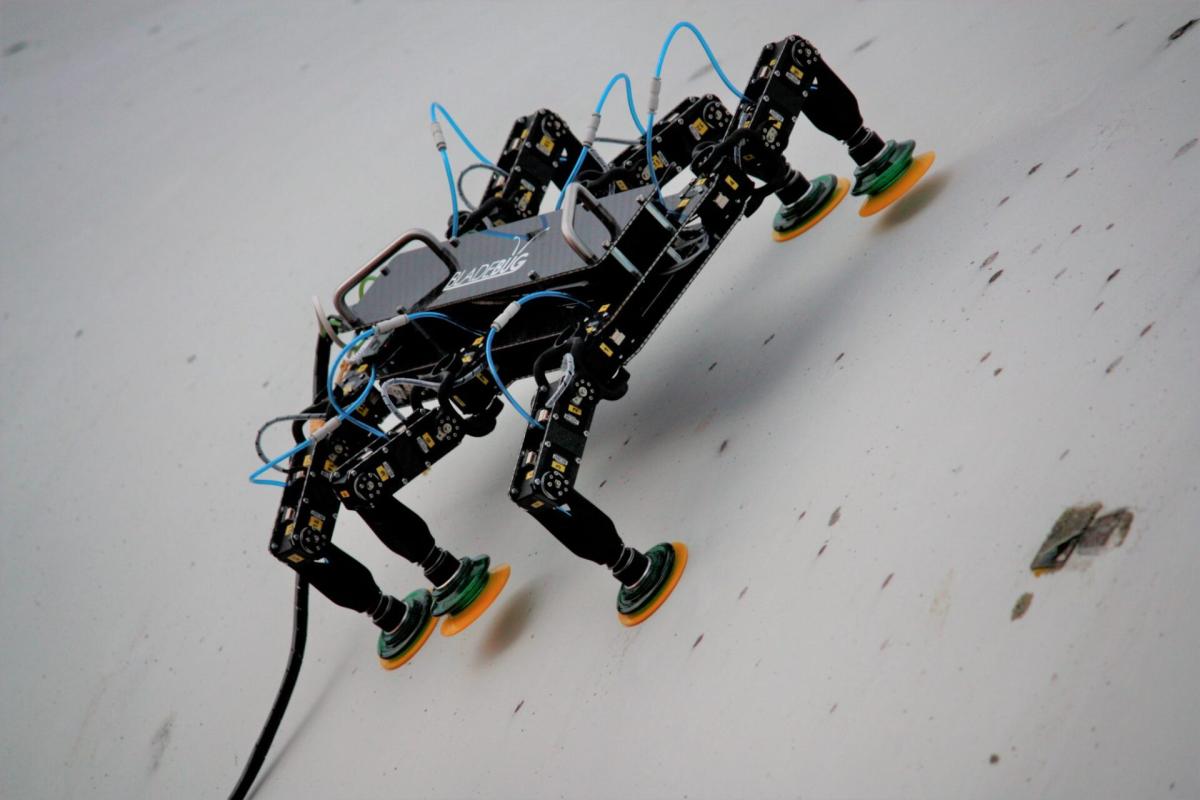
El Reino Unido ha logrado el primer robot capaz de pasearse por una turbina eólica marina, gracias a BladeBUG y Offshore Renewable Energy (ORE) Catapult . Durante dos días a mediados de octubre, el robot de inspección y reparación de seis patas escaló repetidamente las palas en la turbina de demostración de 7MW Levenmouth de ORE Catapult frente a la costa de Fife.
BladeBUG representa una reducción de costos del 30 por ciento en las técnicas actuales de inspección de palas, que son realizadas por técnicos de trabajos verticales en cuerdas, con un efecto de repercusión medible en el costo nivelado de la energía. Para las turbinas de próxima generación, ORE Catapult predice que los ahorros de costos podrían alcanzar hasta el 50 por ciento. Estos costos han sido tradicionalmente una de las principales áreas de preocupación para los operadores en alta mar, ya que las condiciones del mar y las velocidades de punta más rápidas pueden provocar daños importantes en las palas con el tiempo.
El robot se está desarrollando bajo un proyecto de colaboración entre BladeBUG y ORE Catapult, financiado en parte por Innovate UK. Al final del proyecto el próximo año, BladeBUG será capaz de inspeccionar las superficies de las palas en busca de grietas e imperfecciones emergentes, transmitiendo datos sobre su condición a la costa y repavimentando las palas.
BladeBUG había demostrado previamente sus habilidades en secciones de palas y la torre de entrenamiento vertical en el Centro Nacional de Energía Renovable de ORE Catapult en Blyth. El recorrido de la pala en una turbina eólica marina en funcionamiento ha demostrado ahora que el robot puede realizar despliegues prolongados en condiciones del mundo real.
Durante la demostración, el robot caminó 50 metros sobre una pala colocada verticalmente en la turbina de Levenmouth (una longitud de 84 metros con la punta alcanzando 195 metros sobre el mar cuando está en posición vertical).
Las capacidades cruciales del robot demostradas durante la prueba fueron las siguientes:
- Perfecta adherencia de sus pies acolchados al vacío a las superficies de la hoja en condiciones de alta mar
- Capacidad para navegar por la curvatura variable de las superficies de las palas en una variedad de escenarios
- Transmisión de datos de escaneos de la pala y transmisión de video en vivo a los técnicos que demuestran las habilidades de navegación del BladeBUG y la colocación de los pies en superficies cambiantes.
"Esta es una tecnología increíblemente significativa que sabemos que la industria está observando con atención como un cambio potencial de juego", dijo Chris Hill, director de Operaciones de ORE Catapult, quien añadió: “Tiene un claro potencial para reducir costos, reducir el despliegue humano en alta mar y aumentar la vida útil de las palas. Pero todavía teníamos que ver cómo funcionaría el robot en una turbina real en el mar. Considero la primera caminata de BladeBUG en Levenmouth como la 'caminata lunar' de la energía eólica marina, un hito histórico en la evolución de la industria. La robótica está aquí para quedarse y será un ingrediente esencial para operar parques eólicos en constante expansión, zonas de aguas más profundas y turbinas más grandes y más rápidas en los próximos años.
Chris Cieslak, CEO de BladeBUGseñaló que “este es un momento histórico para nosotros. En poco más de un año hemos pasado de diseñar y probar nuestro primer prototipo, a ver al robot BladeBUG caminar a lo largo de la pala de una turbina eólica marina real. Estamos ansiosos por realizar más pruebas y demostrar las capacidades más allá de la costa".
El robot también es un componente clave del proyecto MIMRee que demostrará una misión de inspección y reparación totalmente autónoma en un parque eólico marino.
Durante estas pruebas, BladeBUG trabajará en colaboración con una embarcación autónoma y equipos de drones, utilizando un brazo robótico para limpiar y resurgir las palas dañadas. Las pruebas finales de la tecnología del sistema MIMRee están programadas para mediados de 2021.





ALFREDO Zambrana PortalesZambranaportàlesalfredo@gmail.comz
11/11/2020